

Kuljeskelet kauppakeskuksessa etsimässä tiettyä myymälää. Liikkeen sivut löytyvät kyllä kännykällä, mutta valitettavasti puhelin ei vielä pysty opastamaan sinua kyseisen liikkeen ovelle. Etsit ostosparatiisista näyttötaulun, joka kertoo sinulle reitin. Kauppakeskuksen ulkopuolella kännykkäsi opastaisi sinut ovelta ovelle, mutta sisälle satelliittipaikannuksen (GNSS) signaali ei kantaudu, koska se ei pääse katon tai seinien läpi.
Kun lopulta palaat autohallin puolelle ja onnistut löytämään autosi ilman kännykän tarkempaa reittiopastusta, istut autoon ja laitat seuraavan kohteen sen navigaattoriin. Autonavi ei kuitenkaan vielä nykypäivänä tunne reittiä hallista ulos tielle, eikä usein osaa neuvoa vielä ulos tullessakaan, mihin suuntaan kääntyä, sillä vaikka paikka on ainakin rakennuksen tarkkuudella tiedossa, auton etenemissuunta ei olekaan. Onneksi nykyinen ihmiskuljettaja osaa lukea kylttejä ja päätellä niistä yleensä oikean suunnan vähän tuntemattomammassakin paikassa.
Muutaman vuoden päästä autonominen auto on vastaavassa tilanteessa vähän enemmän hukassa ja kääntyneekin ajoittain väärään suuntaan ennen kuin GNSS-satelliitit ovat löytyneet ja niiden myötä tieto oikeasta etenemissuunnasta. Saattaisi olla melkoisen kiusallista katsoa robotaxissa vierestä, kun autonominen auto kääntyy ruuhka-aikaan väärään suuntaan, kun itse tiedät, että pian on edessä ylimääräinen U-käännös tai korttelin kierto.
Tavallinen kompassi ei riitä
Tulevaisuudessa edellä kuvatut ongelmat ovat toivottavasti historiaa Muratan pioneerikehityksen ansiosta. Tällä hetkellä Muratan tutkimus- ja kehitysyksikössä tehdään kehitystyötä uudentyyppisen MEMS-gyrokompassin mahdollistamiseksi ja kehittämiseksi. MEMS-gyrokompassi on liikeantureihin perustuva kompassi, joka käyttää MEMS-kulmanopeusantureita (gyro) maapallon pyörimisakselin suunnan eli tosipohjoisen määrittämiseen.
Tähän mennessä perinteisempiä gyrokompasseja on ollut käytettävissä ainoastaan esimerkiksi ilmailun ja merenkulun sovelluksissa, joissa niiden suuri koko ja kallis hinta ovat olleet perusteltuja. Uuden MEMS-gyrokompassin on tarkoitus pudottaa kokoa ja hintaa useammalla kertaluokalla, minkä uskotaan riittävän alkuvaiheessa ainakin autonomisten autojen ja teollisten sovellusten markkinoille. Kulutuselektroniikan markkinat, kuten älypuhelimet vaativat vielä kertaluokan pienennyksen sekä koossa että hinnassa.
Entä tavanomainen kompassi, eikö sekin näytä suuntaa? Edullisia elektronisia magneettikompasseja on ollut markkinoilla jo pitkälle toistakymmentä vuotta – esimerkiksi älypuhelimissa. Maan magneettikentän mittaamiseen perustuva kompassi toimii hyvin metsässä suunnistaessa, mutta useimmissa arkipäivän sovelluksissa niiden käyttöön liittyy perustavia ongelmia, kuten esimerkiksi magneettinen eranto ja ympäristön magneettikentät.
Maan magneettiset navat poikkeavat melko paljon tosipohjoisesta, tätä poikkeamaa kutsutaan erannoksi. Eranto riippuu paikasta, minkä lisäksi se muuttuu ajan kuluessa magneettisten napojen vaeltaessa jatkuvasti yhä suuremmalla nopeudella. Vielä suuremman ongelman muodostavat kuitenkin ympäristön häiriöt. Ihmisen muokkaama ympäristö häiritsee elektronista kompassia sekä moninaisten magneettikenttien että magneettisten materiaalien kautta.
Useat ympäristön materiaalit, kuten esimerkiksi auton kori, raudoitettu betoni ja muut metalliset rakenteet ovat magneettisia ja esimerkiksi voimalinjat, autojen sähkölaitteiden suuret sähkövirrat tai vaikkapa akkulaturit aiheuttavat toimiessaan magneettikenttiä, jotka ovat helposti vähän kauempanakin moninkertaisia maan pieneen magneettikenttään verrattuna. Edellä mainittujen seikkojen vuoksi magneettikompassi ei sovellu varsinkaan ajoneuvon suunnan määrittämiseen.
Suunnan määrittäminen mahdollistuu possible
MEMS-gyrokompassi toimii yleensä nk. pohjoisen etsinnän periaatteella, siinä kulmanopeusanturia käännetään tasossa eri suuntiin. Kääntämällä anturin mittausakselia tasossa päästään oleellisesti eroon kulmanopeusanturin nollapistevirheestä, mikä on MEMS-kulmanopeusantureissa tyypillisesti satoja kertoja itse suunnasta riippuvaa kulmanopeutta suurempaa. Anturin näyttämän tulisi muuttua sinimuotoisesti suunnan funktiona; mittausakselin osoittaessa pohjoiseen anturi näkee osan maapallon kulmanopeudesta näyttämän kasvuna ja vastaavasti etelään päin sen pienenemisenä.
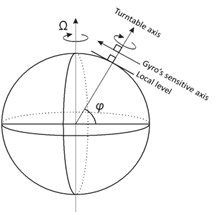
Pohjoisen etsintä tasossa.
Muratan MEMS-gyroteknologian tämänhetkinen suorituskyky mahdollistaa parhaimmillaan pohjoisen suunnan löytymisen ±4° tarkkuudella alle 10 sekunnin ajassa. Suunnan määritykseen kuluva aika kasvaa tarkkuuden neliöön, joten esimerkiksi ±1° tarkkuus vaatii jo 16-kertaisen ajan eli reilut 2 minuuttia. Tämän voimakkaan aikariippuvuuden takia kyseinen sovellus on tullut käytännössä mahdolliseksi vasta hiljattain parhaiden edullisten MEMS-gyroskooppien kohinan saavuttaessa kriittisen tason.
Murata on markkinajohtaja autojen ajovakaudenhallintajärjestelmien liikeanturien suorituskyvyssä. Markkinoilla tyypillisen kulmanopeusanturin kohinataso on 4-10-kertainen Muratan uusiin kolmannen sukupolven antureihin verrattuna. Tämä johtaa kymmeniä kertoja pidempään mittausaikaan, sekuntien sijaan useisiin minuutteihin. Jo turvallisuudenkaan vuoksi näin pitkiin mittausaikoihin ei ole liikenteessä varaa. Merkittävä suorituskykyetu antaa meille ainutlaatuisen tilaisuuden laajentua uusille sovellusalueille, mikä kilpailevilla MEMS-antureilla käytännössä ei vielä edes ole mahdollista.
Tulevaisuudessa, kun suorituskykyisten kulmanopeusanturien hinnat ja koko saadaan riittävän alhaisiksi, MEMS-gyrokompassit tulevat löytämään paikkansa myös henkilökohtaisista laitteistamme. Tämän teknologian ansiosta silloin myös se etsimäsi liike löytyy puhelimesi avulla vaivatta kauppakeskuksessa ilman suurempaa etsiskelyä.
CES 2018 -messuilla ensi kertaa esitelty Muratan MEMS-liikeanturiin perustuva gyrokompassin demonstraatio.
Anssi Blomqvist
Fellow, R&D

